Llc "hüdrapaki toite- ja juhtimissüsteemid". Hydrapaki toite- ja juhtimissüsteemid Hydrapaki toite- ja juhtimissüsteemid
Pärast selle peatüki materjali uurimist peab õpilane:
tean
- elektriliste elektroonikaseadmete juhtimissüsteemide rakendamisel kasutatavad juhtimispõhimõtted;
- elektrilise jõuseadme juhtimissüsteemi struktuur;
- transistoride ja türistoride juhtimiseks kasutatavate impulssmuundurite tööpõhimõtted, galvaanilise isolatsiooni tagamise meetodid;
- voolu- ja pingeandurite põhiahelad;
- üldine teave juhtimissüsteemide elementide baasi kohta;
oskama
- toiteelementide võtmete juhtimiseks vali impulssmuundurid (draiverid);
- vali andurid vooluelektriseadmete voolude ja pingete mõõtmiseks;
oma
Oskused elektrilise jõuseadme juhtimissüsteemi elementide valimisel vastavalt selle funktsionaalsele otstarbele.
Juhtimise ja reguleerimise aluspõhimõtted
Jõuelektroonilise seadme (SEU) juhtimissüsteemi (CS) põhiülesanne on kindlaksmääratud kvaliteedi tagamine ja selle väljundparameetrite juhtimine, mis neid vastavalt seadusele stabiliseerib või muudab. Traditsioonilised juhtimissüsteemid jagunevad süsteemideks, mille puhul juhitakse kontrollitava parameetri kõrvalekallet ja (või) häiret, mis seda kõrvalekallet põhjustab. EMS-is on reeglina reguleeritav parameeter väljundpinge või voolu väärtused. Kõige enam väljenduvad häirivad parameetrid on toiteallika sisendpinge ja koormuse suurus ja / või laad.
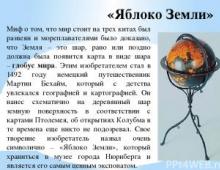
Joon. 2.1, b / näitab kõrvalekalde juhtimisega juhtsüsteemi plokkskeemi. Teave väljundfunktsiooni / väljundi väärtuse kohta (jõuseadme (MF) 0 väärtus võetakse andurilt (D) ja sisestatakse võrdlusseadmesse seatud väärtusega / 0. Sel juhul on meil näide regulatsioonist, mis põhineb klassikalise negatiivse tagasiside põhimõttel (OS). Selle põhimõtte peamine eelis on
Joonis: 2.1.
ja - kõrvalekalde järgi; b - ennekuulmatult
see on see, et see pakub staatilistes režiimides hüvitist peaaegu igat tüüpi seadmes tekkivate häirete eest, sealhulgas mitmesuguste võimenduste, temperatuuri jne muutuste tagajärjel. Samal ajal on dünaamilistes režiimides vajaliku kvaliteedi ja stabiilse töö tagamine sageli keeruline ülesanne.
Joon. 2.1 , b on esitatud häirete kontrolli põhimõttele vastav plokkskeem. Näiteks kui väljundfunktsiooni / väljundi väärtus (0 sõltub otseselt sisendist / sisendist (?)), Saab selle sõltuvuse kõrvaldada, rakendades kompensatsioonisüsteemi (BC) sisaldava edasisuunamissilmuse (FS).
siseneb juhtseadmesse koos referentsi / () sisendsignaaliga, mis genereerib juhtsignaali, mis tagab väljundfunktsiooni väärtuse muutumise. Selle tulemusel on välistatud muutuse / bx (?) Sõltuvus väärtusest / Bb1X (?). Sellist juhtimissüsteemi nimetatakse ka invariantseks, s.o. ükskõiksus nördimuse mõjude suhtes. Ilmselt on vaadeldava juhtumi korral tagatud häiringute üht tüüpi häiring. Invariantsuse piirkonna laiendamiseks on vaja igat tüüpi häirete jaoks sisse viia otseühendused korrektsiooniplokkidega. Praktikas võetakse sellised ühendused kasutusele peamiste otseste häiringute jaoks. Arvestamata häirete mõju kahjustab kontrollitava parameetri stabiilsust. Teisest küljest suurendavad otsesidemed süsteemi kiirust ja stabiilsust. Seetõttu kasutatakse vajadusel kombineeritud süsteemi, mis ühendab hälbe ja häirete kontrolli põhimõtted. Sellistel juhtudel on kõrvalekaldega juhtimist tagav tagasiside silmus inertsem ja sellel on väike võimendus, kuna see täidab kontrollitava parameetri korrigeerimise funktsiooni elektrijaama püsiseisundi režiimides.
EMÜ-de kui juhtimisobjektide eripära on see, et neis toimuvad protsessid joodiga lülitusvõimsuse lülitite mõjul ja neil on diskreetne iseloom. ESS-i voolude ja pingete silumiseks kasutatakse filtreid, mis koosnevad reaktiivsetest elementidest (induktiivsed või mahtuvuslikud). Seetõttu võib ESP võimsuse osa üldiselt esitada mittelineaarsete võtmeelementide ja reaktiivseid ja takistusi sisaldavate lineaarsete vooluahelatena. Sellega seoses erinevad SEP juhtimismeetodid ja nende analüüs mitmekesiselt ning valitakse iga SEP tüübi jaoks, võttes arvesse selle vooluahela konstruktsiooni, töörežiime ja põhiparameetrite omaduste nõudeid. Juhtimissüsteemi juhtimispõhimõtte kohaselt võib SEP tinglikult jagada kahte rühma:
- faasikontrollisüsteemid;
- impulssjuhtimisega süsteemid.
Faaside juhtimist kasutatakse vahelduvvooluvõrku ühendatud ECS-is ja lülititena kasutatakse loomuliku kommutatsiooniga türistoreid. Nende juhtimissüsteemide hulka kuuluvad alaldid, sõltuvad muundurid, otsesageduse muundurid jne. Impulssjuhtimisega süsteeme saab praegu kasutada peaaegu igat tüüpi muundurites ja regulaatorites, mis on valmistatud täielikult kontrollitavate lülitite alusel - transistorid, lukustatavad türistorid jne. Nendele tavalised süsteemid on toitelülitite kasutamine regulaatorite täitevorganitena.
Faasijuhtimissüsteemid (FU) saab omakorda jagada sünkroonseks ja asünkroonseks.
Sünkroonsetes süsteemides sünkroniseeritakse juhtimpulsside tekkimise hetked alati toitevõrgu pingega, millega võti on ühendatud. Reguleerimise käigus muutub impulsi moodustumise faas nii, et ESS-i kontrollitav parameeter püsib antud tasemel. Traditsiooniline lihtsaim viis faasi nihutamiseks reguleerimise ajal on vertikaalse faasi juhtimise (VFC) meetod. Joon. 2.2, ja on esitatud ühe juhtkanali plokkskeem

Joonis: 2.2.
ja - struktuuriskeem; 6 - Türistori poolt impulsside kujundamise skeemid, mis põhinevad VFU-l Faasinihkeseadme (FSU) sisendisse antakse vahelduvpinge isolatsioonitrafo (Tr) kaudu ja c. FSU põhielement on saeketi pingegeneraator (SPS), mis hakkab moodustuma sinusoidi läbimise alghetkel läbi nulli 9 \u003d 0 ja lõpeb hetkel 9 \u003d i (joonis 2.2, b).
Selline GPN-pinge kestus on vajalik, kui kontrollimpulsi faasi muutuse vahemik on võrdne poolega võrgupinge perioodist. Mõnel juhul on näiteks faasinurga väikeste muutustega võimalik FPG välistada, kasutades sinusoidaalse vormi sisendpinget impulsi moodustamiseks otse k T u c. Pinge ja g, FPG poolt genereeritud võrreldakse ebakõlasignaaliga r, mis saabub näiteks ESS-i tagasisideahela kaudu (vt joonis 2.1, ja) võrdlusele (K). Pingete võrdsuse hetkel ja r ja e väljundis genereeritakse impulss ja ja mis muundatakse seejärel juhtsignaaliks ja kell türistor, kasutades impulssregulaatorit (FYU). Joon. 2.2, b, on näha, et signaali c väärtus määrab nurga a väärtuse, s.o. impulsi kujundamise faas ja y. Nii näiteks e \u003d nurga a \u003d a p ja e \u003d e 9 korral nurga a \u003d a 9 korral.
Tavaliselt on kontrollisüsteemis türistoride arv rohkem kui üks, näiteks kolmefaasilise sillaldi alaldiahelas on neid kuus. Sel juhul võib sünkroonsel CS-l olla türistoride arvuga võrdne kanalite arv või kasutada ühte ühist kanalit kontrollimpulsside faasi juhtimiseks. Esimest tüüpi sünkroonsüsteemi nimetatakse mitmekanaliliseks. Sellise süsteemi puudused on ilmsed. Üksikute funktsionaalsete ühikute tehnoloogiline hajumine kanalite ääres viib ümberlülitusintervallide asümmeetriani ja sellest tulenevalt voolu või pinge soovimatute harmooniliste väljanägemiseni väljundpinge või voolu funktsioonina. Lisaks on mitme kanaliga CS seadistamine keerukam. Kuid sünkroonsüsteemi saab luua ka ühe kanaliga kujunduses (joon. 2.3, a). Samal ajal tarnitakse ühe ühise kanali FSU sisendisse kolmefaasilise pingesüsteemi pinge, millest FPG sünkroniseerimine on võimalik kõigi türistoride lülitusele vastavate momentidega, mille nurk on a \u003d 0, mis vastab dioodide lülitusele kontrollimata alaldis. Sel juhul töötab GPN võrgu sagedusega võrdeliselt kuuekordse sagedusega / u \u003d 6 / s. Sellest lähtuvalt moodustuvad sellise sagedusega impulsid ja y, mis lähevad seejärel läbi impulssijaoturi (RI) türistoridesse (joonis 2.3, b). Impulsside faas muutub ka sel juhul sõltuvalt signaalist 8, mida võrreldakse pingetega ja hr. Sellise juhtimissüsteemi korralduse korral on nurga reguleerimise ulatus igas kanalis piiratud väärtusega l / 3. Selle vahemiku laiendamiseks a-ni on erinevaid lülituslahendusi \u003d kuni.
Asünkroonsetes süsteemides muutub juhtimpulsside genereerimise sagedus võrgupinge sagedusega sünkroonseks ainult püsiseisundis suletud faasi juhtimissilmuse korral. Selliste süsteemide peamised tüübid on "jälgimissüsteemid", mille põhimõte põhineb kontrollitava parameetri ja referentssignaali keskmiste väärtuste võrdlemisel lülitusvaheaegadel, samuti faasiluku ahelaga süsteemide võrdlemisel.

Joonis: 2.3.
ja - struktuur; b - kontrollimpulsskeemid
Impulssjuhtimise põhimõte on jõuelektroonikaseadmetes põhiline, et moodustada etteantud kuju ja vajaliku kvaliteediga voolud ja pinged. See on alus erinevad tüübid muundatud parameetrite impulssmodulatsioon erinevat tüüpi jõuelektroonikaseadmetes. ESP impulsi modulatsiooni peamisi meetodeid käsitletakse peatükis Ch. viis.
SEU täitevorganitel on võim elektroonilised võtmedtöötavad lülitusrežiimides. Impulssjuhtimisega muundurites on lülitussagedus tavaliselt oluliselt kõrgem genereeritud voolude ja pingete põhiliste harmooniliste sagedustest. Ka impulss-alalisvoolu muundurites püüavad nad suurendada lülitite töösagedust väärtustele, mis on piiratud peamiselt tehniliste ja majanduslike kriteeriumidega.
Klahvide töösageduse suurendamine võimaldab viia energiavoo impulsi muundamise pidevale lähemale. See võimaldab väljundparameetrite juhitavust vastavalt nõutavatele seadustele suurendada minimaalse viivitusega nende rakendamisel. Väikeste energiaosade diskreetsete väärtuste kontroll suurendab üldiselt elektrienergia muunduri tehnilist ja majanduslikku efektiivsust, muutes muunduri kaalu ja mõõtmeid energiaühiku kohta. Seetõttu on impulssmuundumist laialdaselt kasutatud mitut tüüpi elektrijaamade loomisel, eriti alalis-alalisvoolu muundurite jaoks (vt 6. peatükk).
Ettevõtte kirjeldus
Ettevõte on korraldatud 29. oktoober 1997.
2006. aasta lõpus loodi kontserni viimase restruktureerimise tulemusel eesmärgiga optimeerida äritegevust ja ühtset juhtimist, valdusettevõtte struktuur HydraPac, fondivalitseja mis on CJSC "HydraPack Holding".
Ettevõtte spetsialiseerumine - keerukate tehniliste lahenduste ja komponentide tarnimine mobiilsete seadmete ja tööstusseadmete tootjatele
Tooted
+ Mobiilse tehnoloogia komponendid:
Hüdrostaatilised ülekanded
Mahulised hüdraulilised masinad
Juhend ja hüdraulilised seadmed
Töövedelike konditsioneerid
Juhtimis- ja pidurisüsteemid
Kajutid ja lisaseadmed
+ Tööstusseadmete komponendid
Pumbajaamad
Hüdraulilised mootorid
Abi - ja diagnostikaseadmed
Juhtimissüsteemid
+ Mootorite ja mehaaniliste ülekannete osakond
Diiselmootorid ja varuosad
Käigukastid
Sillad
Kardaanvõllid
+ Elektroonikaosakond
Elektro-proportsionaalsed juhtkangid
Potentsiomeetrid
Elektroonilised paneelid pult
+ Hüdrosilindrite tootmise tehnoloogiad
Seadmed banaanide tootmiseks
Vardad
Torud
Tihendid
Kolvid
Teljekastid
Aasad
+ Kõrgsurvevoolikute tootmise tehnoloogiad
Seadmed banaanide tootmiseks.
Voolikud
Kiirühendused lahti ühendada
Sisustamine
Torustiku seadmed
Täppistorud
+ Binotto tõstesüsteem keredele, kalluritele ja mehhanismidele
Teleskoopsed hüdrosilindrid
Hüdrosüsteemid
Õlimahutid
Hüdroventiilid
Lõpp peatub
Jõuvõtuvõllid
Käigukasti- ja kolbpumbad
Sisustamine
Voolikud
Pneumaatilised juhtimisseadmed
+ Teenused
Hüdroskeemi väljatöötamine, olemasoleva skeemi parandamine.
Abi komponentide valimisel.
Pakume täielikku valikut hüdraulilisi komponente, diiselmootoreid, mehaanilisi jõuülekandeid.
Abi projektidokumentatsiooni ettevalmistamisel.
Abi varustuse köitmisel, paigaldamisel ja seadistamisel. Masinate eksperimentaalsete prototüüpide väljatöötamise jälgimine enne seeriatootmise alustamist.
Varuosade pakkumine.
Garantii ja garantiijärgne remont.
Hüdrosüsteemide (pumbad, hüdromootorid, hüdroventiilid jne) komponentide ja sõlmede tegeliku oleku kindlaksmääramine laboritingimustes kodumaise ja imporditud toodangu stendidel (stend "MARUMA" Jaapan).
Masinate ja seadmete hüdrosüsteemide diagnostika, kasutades uusimaid tehnilisi vahendeid, mida on tootnud Inglismaa ettevõte "Webtec". Rikete õigeaegseks vältimiseks on plaanitud remonditööde võimalused, mis nõuavad kõige madalamaid kulutusi (komponentide asendamine ainult siis, kui see on tõesti vajalik).
Prototüüpide või katseproovide hüdrosüsteemide kompleksne diagnostika uus tehnoloogia.
Hüdrosüsteemide hooldus.
Remonditööd kokku.
Nõustamine küsimustes hooldus Hüdrosüsteemide remont ja efektiivsus. Brigaadi lahkumise tõhusus töö teostamiseks objektil otse Moskvast 200 km raadiuses, optimaalsed hinnad ja individuaalne lähenemine igale kliendile, tagatud varuosade allahindluste süsteem. Tööd teostatakse nii ühekordsete taotluste kui ka teenuslepingute alusel. Tööd teostavad kõrge kvalifikatsiooniga spetsialistid, kellel on pikaajaline kogemus, garantii antakse igat tüüpi töödele.
Tegevuse tüüp:
tootmine
Valdkonnad:
- Tootmisteenused, masinaehitusettevõtete seadmete remont
- Energeetika
Täiendavad kontaktid
Tehnoloogilised võimalused
Selle ettevõtte kasutajad
Ettevõtte piiratud vastutusega ettevõte "HYDRAPAK POWER AND CONTROL SYSTEMS" 7720572519, registreeritud aadressil 111123, MOSCOW CITY, ENTUZIASTOV SHOSSE, 56, STR 32. Organisatsiooni juhib peadirektor NATALIYA IGOREVNA PURCHINSKAYA. Registreerimisdokumentide kohaselt on põhitegevuseks hüdrauliliste ja pneumaatiliste jõuseadmete tootmine. Ettevõte registreeriti 23. detsembril 2006. Ettevõttele on antud kogu Venemaal asuv registreerimisnumber - 1067761568324. Lisateabe saamiseks võite minna organisatsiooni kaardile ja kontrollida vastaspoole usaldusväärsust.
23.12.2006 Föderatsiooni piirkondadevaheline inspektsioon maksuteenus Nr 46 Moskvas on registreerinud organisatsiooni LLC "GIDRAPAK POWER AND CONTROL SYSTEMS". 28.12.2006 algatati registreerimine riigiasutuses - Vene Föderatsiooni pensionifondi peadirektoraadis nr 7 Moskvas ja Moskva piirkonnas linnaosa Perovo, Moskva. Registreeritud riigiasutuse filiaalis nr 38 - fondi Moskva piirkondlik filiaal sotsiaalkindlustus Venemaa Föderatsioon sai ettevõttest "HYDRAPAKi energia- ja juhtimissüsteemid" 29.01.2018 0:00:00. IN registreerima register viimasel organisatsiooni kirjel on järgmine sisu: Lõpetamine juriidilise isiku (mitteaktiivse juriidilise isiku väljaarvamine juriidiliste isikute ühtsest riiklikust registrist).